Flexible Material Handling using a Vision-Guided Industrial Robot
Project Information
hardware, image-processing, programming, project-managementProject Status: Complete
Project Region: Northeast
Submitted By: Vedang Chauhan
Project Email: vedang.chauhan@wne.edu
Project Institution: Western New England University
Anchor Institution: NE-MGHPCC
Mentors: Vedang Chauhan
Students: Jonathan Blanchard
Project Description
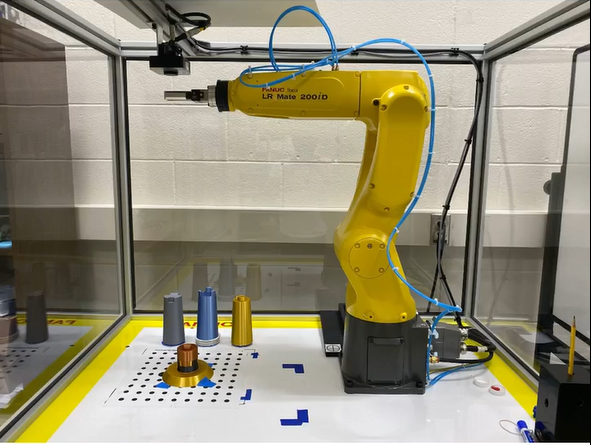
The objective of this project is to design, implement, program and evaluate a Fanuc robot with a 2D Vision Inspection system using the Fanuc ROBOGUIDE software and LR Mate 200 iD/4S robot. A robot mounted camera and Model Learning and Blob Detection tools are used for the part identification.Robots are broadly used in modern manufacturing industries for various tasks such as material handling, painting, welding, machining, assembly and inspection purposes. Advanced robots are integrated with a 2D or 3D vision inspection system to enhance the robot’s capabilities to perform advanced tasks. When it comes to industrial robots, Fanuc represents over 60% of the Industrial Robotics market in North America. From small shops to large assembly operations, manufacturers rely on FANUC automation to help improve productivity, increase quality, maximize profits and maintain a competitive edge. Automotive, Aerospace, Agricultural, Electronics, Food and Beverage, Medical and Pharmaceutical and Oil and Gas are just a few industries from the vast pool of industries that use Fanuc robots. The impact and applications of industrial robotics grows day by day, so industries need engineers who can understand and program the robots.
To accelerate project development and to minimize the cost of initial set up, industries first program robots in the virtual systems. With virtual robots and workcell models, offline programming with a software reduces risk by enabling visualization of single and multi-robot workcell layouts before actual installation. Fanuc offers ROBOGUIDE software that allows users to create, program and simulate a robotic workcell in 3-D without the physical need and expense of a prototype workcell setup.
The objective of this project is to first design, develop and program the Fanuc robot using the iRVision (Fanuc machine vision inspection software) and ROBOGUIDE for battery detection and localization using model learning and blob detection tools. Upon successful verification, transfer the program to the real robot, implement necessary changes and execute the task. A student will be provided with the related resources to learn Fanuc robot programming as a part of the project.
Project Information
hardware, image-processing, programming, project-managementProject Status: Complete
Project Region: Northeast
Submitted By: Vedang Chauhan
Project Email: vedang.chauhan@wne.edu
Project Institution: Western New England University
Anchor Institution: NE-MGHPCC
Mentors: Vedang Chauhan
Students: Jonathan Blanchard
Project Description
The objective of this project is to design, implement, program and evaluate a Fanuc robot with a 2D Vision Inspection system using the Fanuc ROBOGUIDE software and LR Mate 200 iD/4S robot. A robot mounted camera and Model Learning and Blob Detection tools are used for the part identification.Robots are broadly used in modern manufacturing industries for various tasks such as material handling, painting, welding, machining, assembly and inspection purposes. Advanced robots are integrated with a 2D or 3D vision inspection system to enhance the robot’s capabilities to perform advanced tasks. When it comes to industrial robots, Fanuc represents over 60% of the Industrial Robotics market in North America. From small shops to large assembly operations, manufacturers rely on FANUC automation to help improve productivity, increase quality, maximize profits and maintain a competitive edge. Automotive, Aerospace, Agricultural, Electronics, Food and Beverage, Medical and Pharmaceutical and Oil and Gas are just a few industries from the vast pool of industries that use Fanuc robots. The impact and applications of industrial robotics grows day by day, so industries need engineers who can understand and program the robots.
To accelerate project development and to minimize the cost of initial set up, industries first program robots in the virtual systems. With virtual robots and workcell models, offline programming with a software reduces risk by enabling visualization of single and multi-robot workcell layouts before actual installation. Fanuc offers ROBOGUIDE software that allows users to create, program and simulate a robotic workcell in 3-D without the physical need and expense of a prototype workcell setup.
The objective of this project is to first design, develop and program the Fanuc robot using the iRVision (Fanuc machine vision inspection software) and ROBOGUIDE for battery detection and localization using model learning and blob detection tools. Upon successful verification, transfer the program to the real robot, implement necessary changes and execute the task. A student will be provided with the related resources to learn Fanuc robot programming as a part of the project.